
IB Syllabus focus:
'Detailed exploration of Galilean relativity, including the position x′ and time t′ of an event given by:
x′ = x – v t
t′ = tUnderstanding Galilean transformation equations and how they lead to the velocity addition equation:
u′ = u – vDiscussion on the implications of Galilean relativity for classical mechanics.'
Understanding Galilean Relativity
Galilean relativity heralds the principle that the laws of physics, particularly mechanics, are identical in all inertial frames. This section aims to demystify this concept, illustrating how it bridges the observation and mathematical realms.
Position and Time Transformation
One of the principal tenets of Galilean relativity is encapsulated in the transformation equations. These mathematical expressions delineate the relationship between the coordinates (position and time) of an event as perceived in two different inertial frames.
x' = x - vt t' = t
Position Transformation (x'): This equation delineates that the position of an event, as viewed in a moving frame, is the position in the stationary frame less the product of velocity and time. This aligns with the intuitive understanding that the relative position changes linearly with time, dependent on the relative velocity of the two frames.
Time Transformation (t'): Time is absolute in Galilean relativity, meaning it remains unaffected by the relative motion of different inertial frames. This assertion is instrumental in classical mechanics, though it encounters challenges at relativistic speeds.
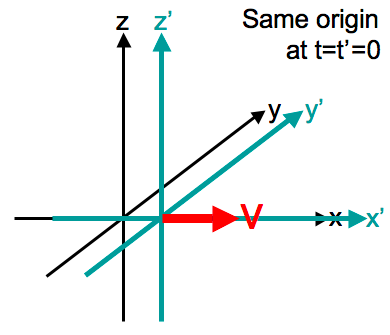
Galilean transformation
Image Courtesy Gerd Kortemeyer
The Velocity Addition Equation
The velocity addition equation, another cornerstone of Galilean relativity, emerges naturally from the transformation equations:
u' = u - v
Velocity in Moving Frame (u'): It is obtained by subtracting the relative velocity of the two frames from the object’s velocity in the stationary frame. This equation is pivotal for calculating relative velocities and is embedded in numerous practical applications, including navigation and collision analysis.
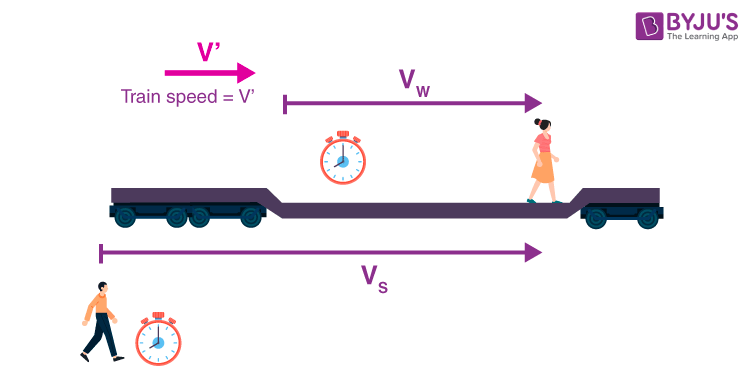
Galilean transformation
Image Courtesy BYJU’s
Implications for Classical Mechanics
Galilean relativity underpins the universality of Newton’s laws of motion across different inertial frames. This section elucidates this connection, tracing the impact of Galilean principles on classical mechanics.
Newton's Laws and Inertial Frames
Uniform Motion: The laws of mechanics are uniform across all inertial frames, a notion fundamental to Newton’s first law. An object remains in rest or uniform motion unless acted upon by an external force, a principle consistently observed in all non-accelerating frames.
Force and Acceleration: The second law, equating force with mass and acceleration, is universally applicable. Whether observed from a stationary or moving frame, the law’s predictions are consistent, underscoring the universality of mechanical laws.
Action and Reaction: The third law’s assertion of equal and opposite reactions is invariant under the Galilean transformation. It attests that forces manifest identically, regardless of the observer’s inertial frame.
Consistency of Mechanical Laws
Mechanical Equations: Mathematical formulations for mechanical phenomena maintain their consistency across inertial frames. This uniformity is a testament to the universal nature of mechanical laws, underscoring their predictability and reliability.
Kinematic Equations: Equations depicting motion, expressed in terms of displacement, velocity, and acceleration, remain invariant across frames. This invariance bolsters the universal applicability of kinematic principles.
Practical Applications
Engineering and Technology: Engineers rely on Galilean relativity to design and analyse mechanical systems. The principles are embedded in technologies ranging from automotive design to industrial machinery.
Astronomy: In the astronomical realm, the motions of celestial bodies and their interactions adhere to the principles of Galilean relativity, provided the velocities involved are much less than the speed of light.
Challenges and Limitations
Galilean relativity, while instrumental, encounters limitations at high speeds. This section dissects these challenges, paving the path to the emergence of special relativity.
Invariance of Speed of Light
Constancy Dilemma: The constant speed of light, a pivotal discovery in modern physics, isn’t accommodated within the Galilean framework. This limitation precipitated the development of special relativity.
High-speed Phenomena: For objects moving close to the speed of light, Galilean relativity’s predictions deviate starkly from observations. This disparity underscored a pivotal gap, leading to Einstein’s revolutionary theory.
Transition to Special Relativity
Lorentz Transformation: Special relativity introduces Lorentz transformations. These equations, unlike their Galilean counterparts, incorporate the constant speed of light and provide precise event descriptions at any speed.
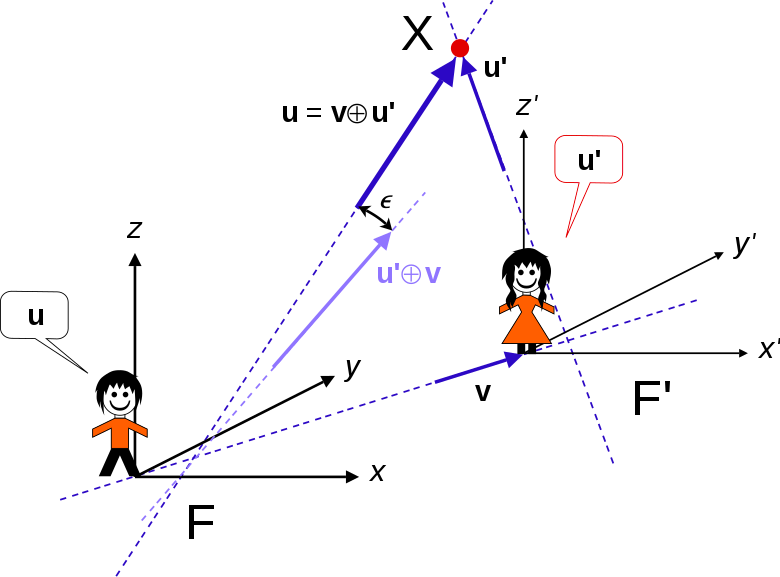
Lorentz transformation for velocity
Image Courtesy Maschen
Time Dilation and Length Contraction: Under special relativity, time dilation and length contraction emerge as intrinsic physical phenomena. These concepts, non-existent in Galilean relativity, are integral to understanding relativistic mechanics.
Relevance in Modern Context
Despite its limitations, Galilean relativity isn’t obsolete. For velocities significantly less than the speed of light, it offers precise predictions and remains a foundational element in classical mechanics education and applications. Its principles are instrumental for students and professionals alike, providing essential tools for motion analysis in a plethora of contexts. Galilean transformations, though superseded by Lorentz transformations at high speeds, retain their applicative relevance and educational value, grounding learners in the fundamental precepts of motion and mechanics.
FAQ
Engineers and technologists utilise the Galilean velocity addition equation in numerous real-world scenarios, especially in contexts involving low-speed dynamics. For instance, in automotive engineering, the equation aids in analysing collision dynamics and vehicle safety by considering relative velocities of vehicles. In maritime navigation, it’s employed to calculate the resultant velocity of ships considering water currents and the ship’s engine-powered speed. The equation’s simplicity and straightforwardness make it a practical tool for quick calculations and analyses where the speeds involved are much less than the speed of light and relativistic effects are negligible.
Galilean transformations underpin the conservation laws in classical mechanics by ensuring that these laws hold consistently across different inertial frames. For instance, the conservation of energy and momentum are foundational in classical mechanics, and their validity is supported by Galilean relativity. Since the transformation equations ensure that the laws of mechanics are the same in all inertial frames, it follows that the conservation laws, integral to those mechanical laws, are also preserved. This consistent application of conservation laws across various frames is a testament to the robustness and universal applicability of Galilean relativity in classical mechanics.
Galilean relativity primarily finds its application in classical mechanics and is not typically extended to quantum mechanics or atomic scales. At the quantum level, particles often exhibit behaviours that are markedly distinct from those predicted by classical physics, necessitating a different theoretical framework. Quantum mechanics employs complex mathematical structures and principles, like wave-particle duality and the uncertainty principle, which are not congruent with the Galilean transformations. At these scales, the velocities of particles can approach significant fractions of the speed of light, requiring the incorporation of relativistic effects not accounted for by Galilean relativity.
Galilean relativity is intertwined with the concept of absolute space and time. It posits that time is a universal, invariant entity, unaltered by the motion of observers or objects. In this framework, the passage of time is consistent across all inertial frames, embodying the idea of absolute time. Similarly, while positions of objects may vary between different frames, the concept of an 'absolute space' is implicitly supported where the laws of physics are consistent in form. It is a precursor to the more complex and nuanced concepts introduced by Einstein’s theory of relativity, where space and time are relative and interconnected.
The velocity addition equation under Galilean relativity faces limitations in the context of electromagnetic theory. Maxwell's equations, which govern electromagnetic phenomena, predict a constant speed of light. However, under Galilean transformations, the speed of light would vary depending on the observer’s relative motion, leading to inconsistencies with experimental evidence. These discrepancies played a significant role in the advent of Einstein’s theory of special relativity, which resolved such inconsistencies by introducing the concept that the speed of light is constant in all inertial frames and offering modified transformation equations (Lorentz transformations) to align with this principle.
Practice Questions
The Galilean transformation equations for position and time are given by x' = x - vt and t' = t, where x' and t' are the position and time of an event in a moving frame, x and t are the position and time in the stationary frame, and v is the velocity of the moving frame relative to the stationary one. These equations suggest that time is absolute and that position changes linearly with the relative velocity of the two frames. The velocity addition equation u' = u - v can be derived from these transformation equations, representing the velocity of an object as observed in a moving frame.
Galilean relativity plays a crucial role in classical mechanics as it ensures the consistency and universality of Newton's laws of motion across different inertial frames. According to Galilean relativity, Newton's laws are invariant, meaning their form and predictions remain constant in all inertial frames. Thus, an object at rest or in uniform motion remains so unless acted upon by an external force, as per Newton’s first law. The second law’s correlation of force and acceleration, as well as the third law’s principle of action and reaction, apply universally, ensuring predictable mechanical behaviour and the broad applicability of these fundamental laws in diverse contexts.
