
The concept of the Average Rate of Change (ARC) is foundational in calculus, enabling us to understand how one quantity changes in relation to another over a given interval. This calculation divides the change in one variable by the change in another, offering a quantifiable measure of change between two points. Through calculus, the ARC concept evolves, especially as we approach intervals where the change in the independent variable tends toward zero, presenting challenges in traditional calculations.
Understanding Average Rate of Change
Definition: The ARC between two points on a function is defined as:
where is the change in the function's value, and is the change in the independent variable's value.
Importance: This concept is crucial for understanding how the output of a function changes relative to changes in the input, providing a basis for more complex calculus concepts, including the derivative.
Transitioning to Calculus
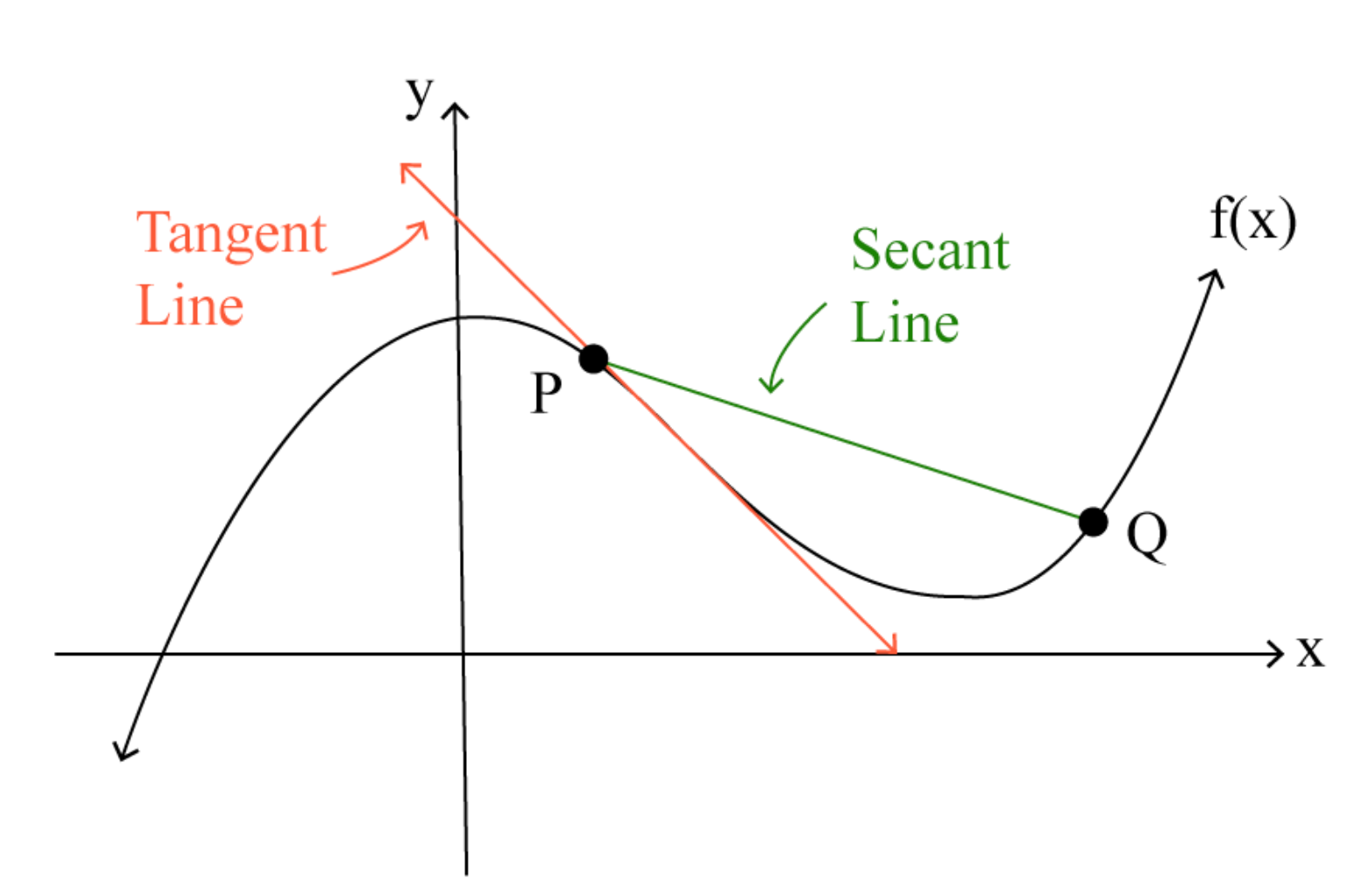
Limits and the ARC: As the interval approaches zero, we encounter the concept of a limit. Calculus allows us to explore what happens to the ARC as approaches , moving towards an instantaneous rate of change.
Example of applying limits to ARC:
Calculating Average Rate of Change: Examples
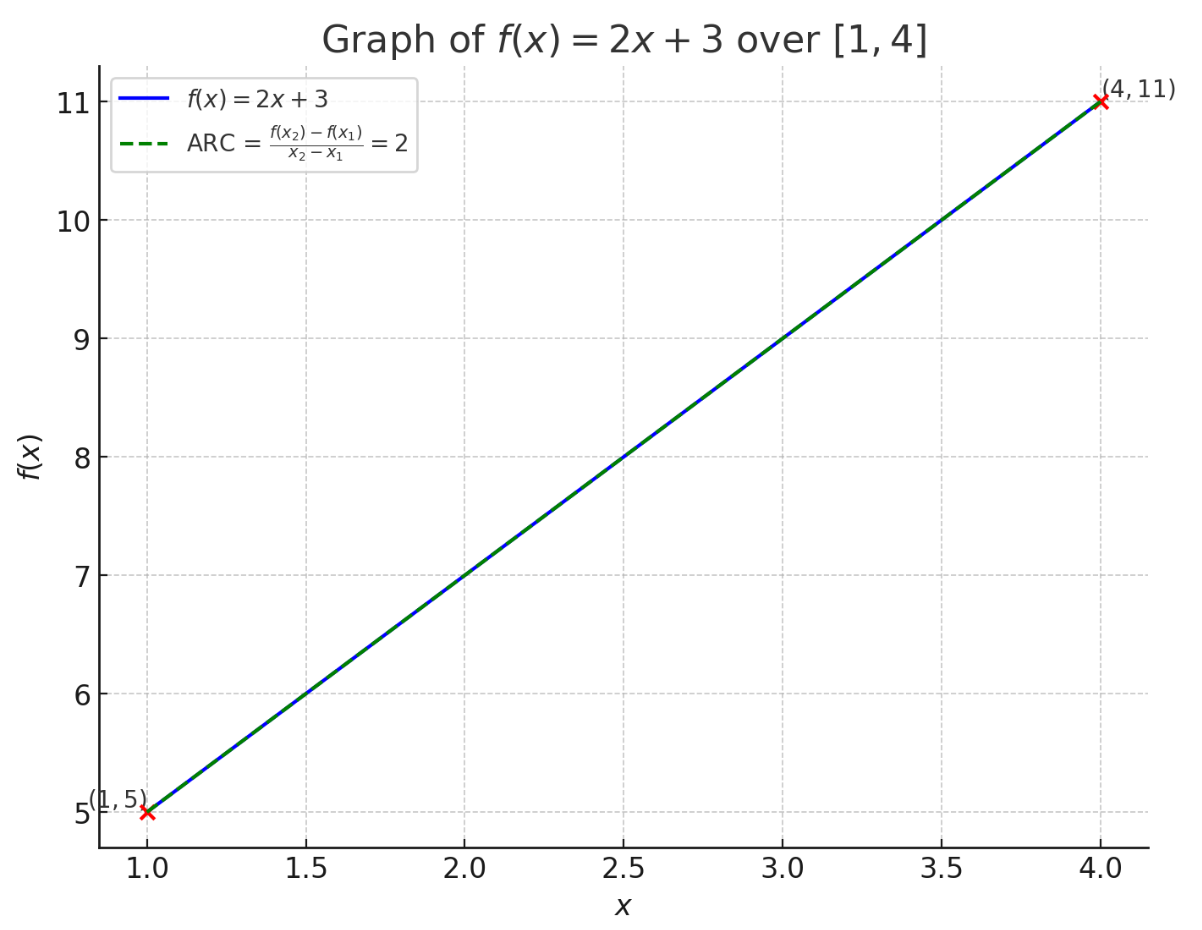
Example 1: Linear Function
Consider the function over the interval [1, 4].
Step 1: Identify and , , .
Step 2: Calculate and , , .
Step 3: Compute ARC,
Result: The ARC of over [1, 4] is 2.
Graphical Representation
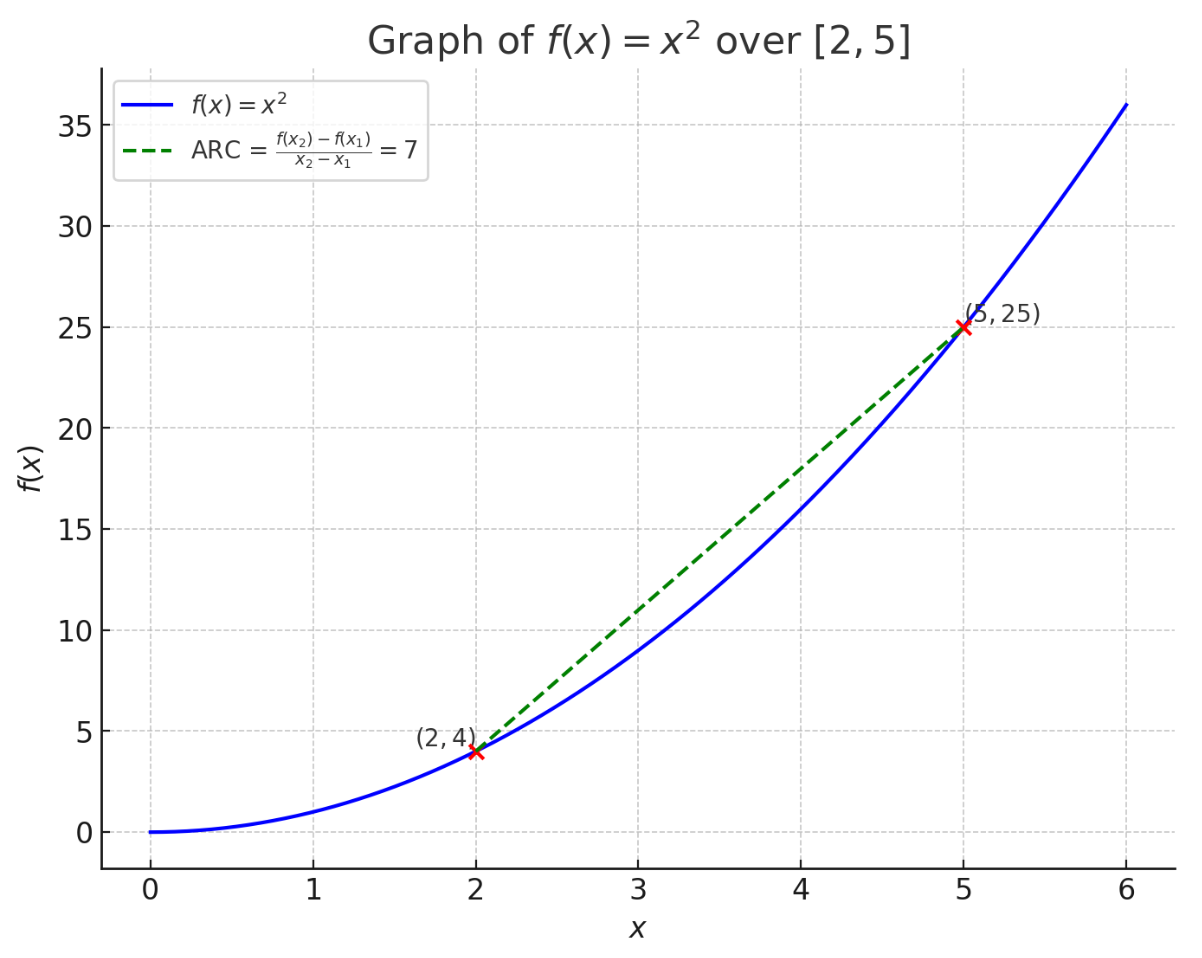
Example 2: Quadratic Function
Consider over the interval [2, 5].
Step 1: Identify points, , .
Step 2: Evaluate and , , .
Step 3: Calculate ARC,
Result: The ARC of over [2, 5] is 7.
Graphical Representation:
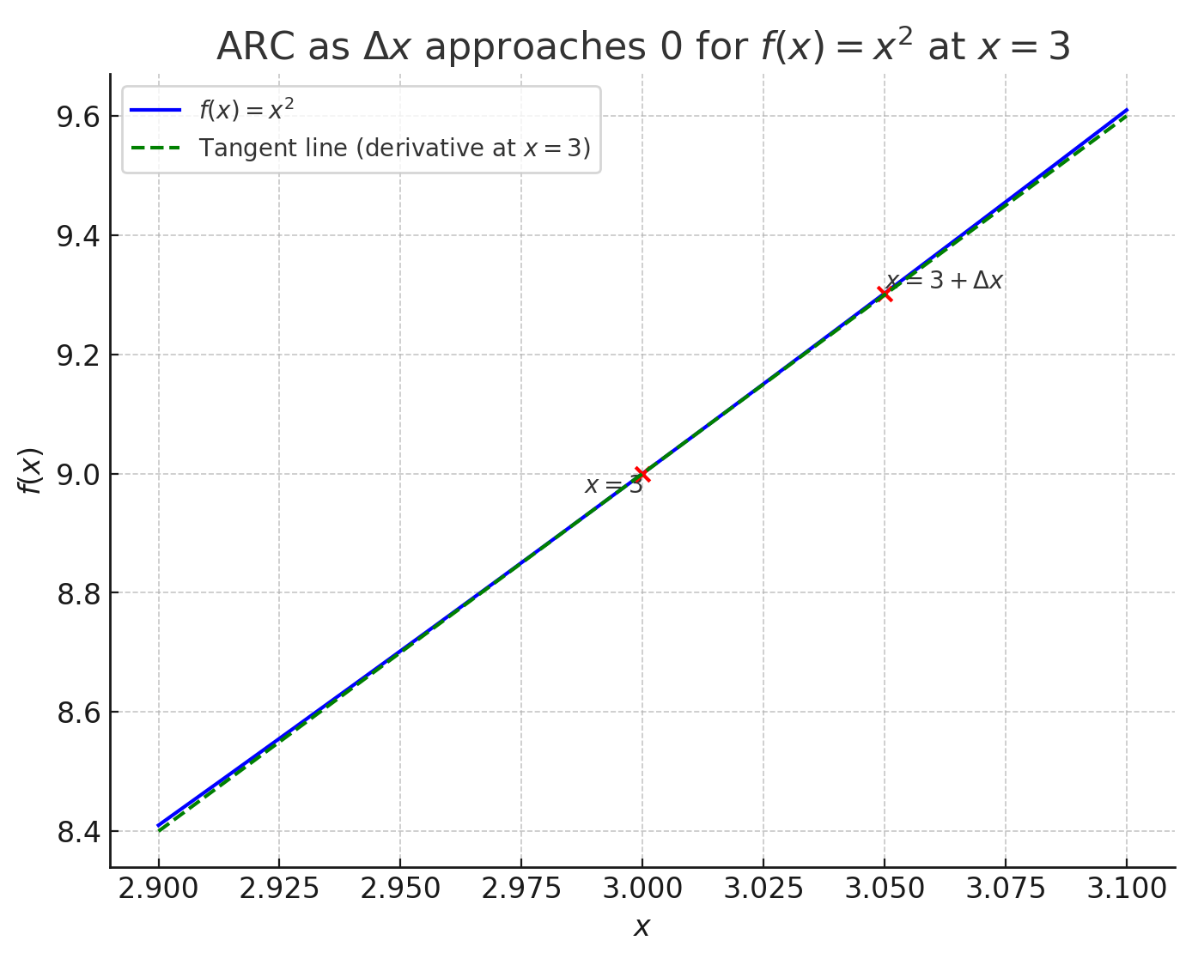
Example 3: Using Limits to Explore ARC's Approach to Zero
Consider as approaches 0 from [3, ].
Step 1: Express ARC as a limit,
Result: As approaches 0, the Average Rate of Change of at approaches 6. This reflects the instantaneous rate of change, or derivative, of at .
Graphical Representation:
Example 4: Real-World Application
Consider a vehicle's distance traveled, described by where is distance in meters and (t) is time in seconds, over the interval [1, 4] seconds.
Step 1: Identify , .
Step 2: Calculate and , , .
Step 3: Compute ARC,
Result: The vehicle's average speed over the interval [1, 4] seconds is 22 meters per second.
Example 5: Changing Rates
For a balloon being inflated, the volume in cubic centimeters is given by where is time in minutes. Calculate the ARC of volume change between 2 and 5 minutes.
Step 1: Identify , .
Step 2: Calculate and ,
Step 3: Compute ARC,
Result: The average rate of volume change between 2 and 5 minutes is cubic centimeters per minute, illustrating how volumes of three-dimensional shapes can change over time.
Practice Questions
Question 1
Given the function , calculate the average rate of change from to .
Question 2
A spherical balloon is being inflated so that its volume at any time in seconds is given by . Calculate the average rate of change of the balloon's volume from seconds to seconds.
Question 3
For the function , compute the average rate of change between and , where is the base of natural logarithms.
Solutions to Practice Questions
Solution to Question 1
1. Identify the function and points: .
2. Calculate and :
3. Compute the average rate of change:
4. Result: The average rate of change from to is .
Solution to Question 2
1. Given volume function: , with and .
2. Find and :
3. Calculate ARC:
4. Result: The average rate of change of the volume from to seconds is cubic units per second.
Solution to Question 3
1. Identify the function and interval: , from to .
2. Calculate and :
3. Compute the ARC:
4. Result: The average rate of change of between and is .
Velocity is the first derivative of position:
Average acceleration: The total change in velocity divided by the total time taken:
Understanding Kinematics
Kinematics is a branch of physics that deals with the mathematical description of motion. Unlike dynamics, which explores the causes of motion through forces, kinematics focuses solely on the geometric aspects of movement. This fundamental approach allows us to develop a strong foundation in motion analysis before introducing the complexities of forces and their interactions.
The Language of Motion
Basic Motion Concepts
Motion occurs when an object's position changes relative to a reference point over time
The study of kinematics requires defining a coordinate system with clear directionality
One-dimensional motion involves movement along a single axis, typically denoted as the x-axis
All motion can be described using three fundamental quantities: position, velocity, and acceleration
The relationships between these quantities form the basis of kinematic analysis
Reference Frames
A reference frame provides the essential context for describing motion
It consists of:
An origin point (0,0) from which all measurements are taken
A clearly defined positive direction
A coordinate system with appropriate units
A time measurement system
The choice of reference frame affects our mathematical description of motion but not the physical motion itself
Multiple reference frames can describe the same motion differently, yet all are equally valid
Vector Quantities in One Dimension
Position Vector
Position represents an object's location relative to the origin at a specific time
In one dimension, position is represented by a single coordinate along the chosen axis
The SI unit for position is the meter (m)
Position can be:
Positive: indicating location in the positive direction from origin
Negative: indicating location in the negative direction from origin
Zero: indicating location at the origin
Expressed mathematically as:
where is the unit vector in the x-direction
The change in position, or displacement, is given by:
Velocity Vector
Understanding Velocity
Velocity describes the rate of change of position with respect to time
It includes both speed (magnitude) and direction (sign in one dimension)
The SI unit is meters per second (m/s)
Velocity is mathematically represented as:
The instantaneous velocity vector points in the direction of motion at any given moment
Types of Velocity
Instantaneous velocity: velocity at a specific moment in time
Defined as the limit of average velocity as time interval approaches zero
Average velocity: total displacement divided by total time interval
The sign of velocity indicates direction in one dimension:
Positive velocity: motion in positive direction
Negative velocity: motion in negative direction
Zero velocity: momentary rest or direction change
Acceleration Vector
Defining Acceleration
Acceleration represents the rate of change of velocity with respect to time
Describes how quickly velocity changes in magnitude and/or direction
SI unit is meters per second squared (m/s²)
Mathematical expression:
Average acceleration can be calculated as:
Important Acceleration Concepts
Can be positive or negative, independent of velocity
Constant acceleration: acceleration remains unchanged over time
Common in many physical situations
Simplifies mathematical analysis
Variable acceleration: acceleration changes with time
Requires calculus for complete analysis
More common in real-world situations
Acceleration occurs when:
Speed changes (speeding up or slowing down)
Direction changes (in higher dimensions)
Both speed and direction change simultaneously
Sign Conventions in One Dimension
Understanding Signs
Signs (+/-) indicate direction along the chosen axis
Positive direction: typically right or up, depending on axis orientation
Negative direction: typically left or down
Consistent sign conventions are crucial for accurate problem-solving
Signs help track:
Direction of motion
Changes in direction
Relative motion between objects
Vector Nature in One Dimension
Although one-dimensional motion occurs along a single axis, quantities remain vectors
Direction is indicated by:
Sign of the quantity (+ or -)
Unit vector notation ()
Vector addition and subtraction follow algebraic rules in one dimension
The dot product simplifies to regular multiplication in one dimension
Applications in Real-World Scenarios
Examples of One-Dimensional Motion
Vertical motion of a thrown ball
Cars moving along a straight highway
Elevator moving up and down
Objects falling under gravity
Train moving along straight tracks
Rocket launch (initial vertical ascent)
Common Misconceptions
Speed versus velocity
Speed is scalar (magnitude only)
Velocity is vector (magnitude and direction)
Position versus displacement
Position is absolute location
Displacement is change in position
Average versus instantaneous quantities
Average describes overall behavior
Instantaneous describes behavior at a specific moment
The significance of positive and negative values
Signs indicate direction, not magnitude
Negative acceleration doesn't always mean slowing down
Remember that kinematics provides the mathematical framework needed to describe motion, forming the basis for more advanced concepts in mechanics. Understanding these foundational concepts is crucial for success in AP Physics C: Mechanics.
Kinematics forms the foundation of mechanics, focusing on describing and analyzing motion through mathematical relationships, without considering the underlying forces that cause the motion.
Introduction to Kinematics: Understanding Motion
The Nature of Kinematics
Kinematics is the branch of physics that describes the motion of objects through space and time, without considering the forces that cause the motion. This fundamental area of physics provides the mathematical tools and concepts needed to analyze movement and make predictions about an object's future position and velocity.
Understanding kinematics is crucial because it:
Forms the foundation for studying more complex physics concepts
Provides essential tools for engineering and design
Helps explain everyday phenomena
Develops critical analytical and problem-solving skills
Vector Quantities in One-Dimensional Motion
Position
Position is a vector quantity that describes an object's location relative to a chosen reference point (origin). In one-dimensional motion:
Denoted by or in equations
Measured in meters (m) in SI units
Can be positive or negative, indicating direction relative to the origin
Represented mathematically as:
Displacement () represents change in position:
Position in Context
When describing position:
The reference point (origin) must be clearly defined
Direction from the origin must be specified
Units must be consistent throughout calculations
Changes in position consider both magnitude and direction
Velocity
Velocity represents the rate of change of position with respect to time and includes both speed and direction. Velocity is characterized by:
Average Velocity
Calculated over a finite time interval
Mathematical expression:
Represents the overall motion during a time period
May not reflect instantaneous conditions
Instantaneous Velocity
Describes motion at a specific moment
Mathematically expressed as:
More useful for analyzing continuous motion
Can vary from moment to moment
Velocity Characteristics
SI unit is meters per second (m/s)
Vector representation:
Sign indicates direction of motion
Magnitude equals speed in one dimension
Acceleration
Acceleration is the rate of change of velocity with respect to time. It describes how velocity changes and has several important aspects:
Types of Acceleration
Average Acceleration:
Calculated over a time interval
Mathematical expression:
Useful for overall motion analysis
Instantaneous Acceleration:
At a specific moment in time
Mathematical expression:
Critical for detailed motion analysis
Acceleration Properties
SI unit is meters per second squared (m/s²)
Vector representation:
Can be positive, negative, or zero
Sign indicates direction of velocity change
Vector Nature in One Dimension
Understanding Vectors vs. Scalars
In one-dimensional motion, vector quantities have distinct characteristics:
Direction indicated by positive or negative signs
Magnitude represents the size of the quantity
Vector addition follows algebraic rules:
Vector subtraction:
Reference Frames
The choice of reference frame is crucial in kinematics:
Defines positive and negative directions
Establishes the origin (x = 0)
Must remain consistent throughout problem-solving
Can affect the mathematical description of motion
Reference Frame Considerations
Should be chosen to simplify problem-solving
Must be clearly specified and maintained
Can be relative to moving or stationary objects
Affects numerical values but not physical reality
Mathematical Foundations
Calculus Relationships
The fundamental relationships between position, velocity, and acceleration are interconnected through calculus:
Derivative Relationships
Velocity from position:
Acceleration from velocity:
Acceleration from position:
Integration Relationships
Position from velocity:
Velocity from acceleration:
These relationships are crucial for advanced problem-solving
Sign Conventions
Understanding sign conventions is essential for problem-solving:
Positive direction: Usually right or up
Negative direction: Usually left or down
Combined effects:
Positive velocity and positive acceleration: Speeding up in positive direction
Positive velocity and negative acceleration: Slowing down in positive direction
Negative velocity and positive acceleration: Slowing down in negative direction
Negative velocity and negative acceleration: Speeding up in negative direction
1.1.1 Introduction to Kinematics
Kinematics is a branch of physics that studies the motion of objects without considering the forces causing the motion. This foundational concept forms the basis for understanding one-dimensional motion and introduces key vector quantities such as position, velocity, and acceleration.
Kinematics: The Study of Motion Without Forces
Kinematics focuses solely on describing how objects move, leaving out the causes of motion, such as forces and energy. It provides a mathematical framework to study motion using equations, graphs, and other tools. By isolating motion from external influences, kinematics enables students to develop a clear understanding of movement in a simplified context.
Key Features of Kinematics
Focus on motion: Emphasizes movement without analyzing forces.
Simplified models: Assumes idealized conditions, such as no air resistance.
Foundation for dynamics: Serves as a prerequisite for studying Newton’s laws.
Understanding Motion in One Dimension
One-dimensional motion occurs when an object moves along a straight line. The motion can either be in a single direction or involve changes in direction along the same line. In kinematics, this is analyzed using three critical vector quantities: position, velocity, and acceleration.
Introduction to Vector Quantities
Vector quantities in kinematics describe motion using both magnitude and direction. These include position (xxx), velocity (vvv), and acceleration (aaa). Understanding these vectors is essential for analyzing one-dimensional motion.
Position (xxx)
Position specifies the location of an object relative to a reference point, often chosen as the origin of a coordinate system.
Represented as x(t)x(t)x(t), where ttt is time.
Can have positive or negative values depending on the direction relative to the origin.
Measured in meters (m) in the SI system.
Example:
An object located 5 m to the right of the origin has x=+5 mx = +5 \, \text{m}x=+5m. If it moves 3 m to the left, its position becomes x=+2 mx = +2 \, \text{m}x=+2m.
Velocity (vvv)
Velocity describes the rate of change of position over time, including the direction of motion. It is calculated using the formula:
v=ΔxΔtv = \frac{\Delta x}{\Delta t}v=ΔtΔx
Where:
vvv = velocity (m/s)
Δx\Delta xΔx = change in position
Δt\Delta tΔt = change in time
Key Points:
Instantaneous velocity: The velocity of an object at a specific instant, calculated as: v=dxdtv = \frac{dx}{dt}v=dtdx
Average velocity: The total displacement divided by the total time taken: vavg=xfinal−xinitialtfinal−tinitialv_{\text{avg}} = \frac{x_{\text{final}} - x_{\text{initial}}}{t_{\text{final}} - t_{\text{initial}}}vavg=tfinal−tinitialxfinal−xinitial
Velocity includes direction. A positive velocity indicates motion in the positive direction, while a negative velocity indicates motion in the opposite direction.
Example:
If a car moves 100 m east in 5 seconds, its velocity is:
v=100 m5 s=20 m/sv = \frac{100 \, \text{m}}{5 \, \text{s}} = 20 \, \text{m/s}v=5s100m=20m/s
If the car reverses and travels 50 m west in 2 seconds, its velocity is:
v=−50 m2 s=−25 m/sv = \frac{-50 \, \text{m}}{2 \, \text{s}} = -25 \, \text{m/s}v=2s−50m=−25m/s
Acceleration (aaa)
Acceleration measures the rate at which velocity changes over time. It is calculated as:
a=ΔvΔta = \frac{\Delta v}{\Delta t}a=ΔtΔv
Where:
aaa = acceleration (m/s²)
Δv\Delta vΔv = change in velocity
Δt\Delta tΔt = change in time
Key Points:
Instantaneous acceleration: The acceleration at a specific moment in time: a=dvdta = \frac{dv}{dt}a=dtdv
Average acceleration: The total change in velocity divided by the total time taken: aavg=vfinal−vinitialtfinal−tinitiala_{\text{avg}} = \frac{v_{\text{final}} - v_{\text{initial}}}{t_{\text{final}} - t_{\text{initial}}}aavg=tfinal−tinitialvfinal−vinitial
Acceleration is a vector quantity. A positive acceleration indicates an increase in velocity in the positive direction, while a negative acceleration (deceleration) signifies a decrease.
Example:
If a car’s velocity changes from 10 m/s10 \, \text{m/s}10m/s to 30 m/s30 \, a=30 m/s−10 m/s5 s=4 m/s2a = \frac{30 \, \text{m/s} - 10 \, \text{m/s}}{5 \, \text{s}} = 4 \, \text{m/s}^2a=5s30m/s−10m/s=4m/s2</p><hr><h2 id="relationships-between-position-velocity-and-acceleration">Relationships Between Position, Velocity, and Acceleration</h2><p>In one-dimensional motion, these vector quantities are interrelated:</p><ul><li><p>Velocity is the derivative of position: v=dxdtv = \frac{dx}{dt}v=dtdx</p></li><li><p>Acceleration is the derivative of velocity: a=dvdta = \frac{dv}{dt}a=dtdv</p></li></ul><h4>Implications:</h4><ul><li><p>If a=0a = 0a=0, velocity remains constant, and the object moves with uniform motion.</p></li><li><p>If v=0v = 0v=0 and a≠0a \neq 0a=0, the object is momentarily at rest but accelerating.</p></li></ul><hr><h2 id="direction-and-sign-conventions">Direction and Sign Conventions</h2><p>To describe motion in one dimension effectively, a consistent sign convention is used:</p><ul><li><p><strong>Positive direction</strong>: Motion in the chosen positive axis direction (e.g., right or upward).</p></li><li><p><strong>Negative direction</strong>: Motion opposite to the positive axis direction (e.g., left or downward).</p></li></ul><h3>Examples of Sign Conventions:</h3><ol><li><p>An object moving rightward with increasing speed:</p><ul><li><p>v>0v > 0v>0, a>0a > 0a>0</p></li></ul></li><li><p>An object moving leftward with decreasing speed:</p><ul><li><p>v<0v < 0v<0, a>0a > 0a>0</p></li></ul></li></ol><hr><h2 id="real-life-applications-of-kinematics">Real-Life Applications of Kinematics</h2><ul><li><p><strong>Sports</strong>: Analyzing the motion of players or projectiles.</p></li><li><p><strong>Vehicles</strong>: Calculating stopping distances and acceleration times.</p></li><li><p><strong>Astronomy</strong>: Studying the motion of celestial objects.</p></li></ul><hr><h2 id="key-takeaways">Key Takeaways</h2><ul><li><p><strong>Position</strong> defines where an object is located.</p></li><li><p><strong>Velocity</strong> measures how fast and in what direction it moves.</p></li><li><p><strong>Acceleration</strong> indicates how quickly velocity changes.</p></li><li><p>The interplay of these quantities forms the basis of one-dimensional motion analysis.</p></li></ul><p>This introductory framework provides the foundation for more advanced topics in kinematics, such as uniformly accelerated motion and nonuniform acceleration, covered in later sections.</p><p></p><hr><hr><hr><hr><hr><h1>1.1.1 Introduction to Kinematics</h1><p>Kinematics is a branch of mechanics that studies the motion of objects without considering the forces that cause or influence the motion. This introduction provides a foundational understanding of motion in one dimension, focusing on vector quantities like position, velocity, and acceleration.</p><hr><h2 id="what-is-kinematics">What is Kinematics?</h2><p>Kinematics is the study of motion, specifically how objects move, without examining why they move. Unlike dynamics, which explores forces and their effects, kinematics focuses solely on describing motion through mathematical relationships.</p><h3>Key Features of Kinematics</h3><ul><li><p><strong>Focus on motion</strong>: Kinematics describes an object's movement in terms of position, velocity, and acceleration.</p></li><li><p><strong>Neglect of forces</strong>: It does not account for the causes of motion, such as gravity, friction, or applied forces.</p></li><li><p><strong>Quantitative analysis</strong>: Relies heavily on equations and graphs to analyze motion.</p></li></ul><p>Kinematics is often the first step in understanding more complex concepts in mechanics because it establishes the tools and methods needed to describe motion.</p><hr><h2 id="vector-quantities-in-kinematics">Vector Quantities in Kinematics</h2><p>Motion in one dimension is best described using <strong>vector quantities</strong>, which have both magnitude and direction. These quantities include <strong>position</strong>, <strong>velocity</strong>, and <strong>acceleration</strong>.</p><h3>Position (x\text{m}x(t)xx = +10x = -5vv = \frac{dx}{dt}\text{m/s}\Delta t\Delta x\Delta taa = \frac{dv}{dt}\text{m/s}^2\Delta t\Delta v\Delta txa⃗=10 m/s−2 m/s4 s=2 m/s2.\vec{a} = \frac{10 \, \text{m/s} - 2 \, \text{m/s}}{4 \, \text{s}} = 2 \, \text{m/s}^2.a=4s10m/s−2m/s=2m/s2x(t)=x0+v0t+12at2x(t) = x_0 + v_0 t + \frac{1}{2} a t^2x(t)=x0+v0t+21at2$.
25 grams× 18.015 grams/1 mole ≈ 1.387 moles.
Calculating the Reaction Quotient
The calculation of Q involves the concentrations or partial pressures of the chemical species involved in the reaction. The general formula for a reaction:
aA+bB→cC+dD
is expressed as:
Qc = C]c[D]dA]a[B]b
for concentrations, and similarly for partial pressures:
Qp = (PC)c(PD)d(PA)a(PB)b
Where: [A], [B], [C], and [D] represent the molar concentrations of the reactants and products, respectively. PA, PB, PC, and PD denote the partial pressures of the gases involved: a, b, c, and d are the stoichiometric coefficients from the balanced chemical equation.
Maps are essential tools in geography, used to represent spatial information and analyze patterns in the world around us. They help geographers, urban planners, policymakers, and researchers understand relationships between locations and visualize complex data. Maps can be broadly classified into two categories: reference maps and thematic maps. Each type serves a distinct purpose, with reference maps focusing on general geographic information and thematic maps emphasizing specific data trends and distributions.
Understanding the different types of maps and how they represent spatial information is critical for interpreting geographic data accurately. This section will explore the characteristics, uses, and examples of reference maps and thematic maps, along with the various subtypes within each category.
Reference Maps and Thematic Maps
Purpose and Differences
Maps can be divided into two primary types based on their function and the kind of data they represent:
Reference Maps: These maps provide general geographic context by showing physical and human-made features such as cities, rivers, political boundaries, roads, and landforms. They are primarily used for navigation, location identification, and spatial awareness.
Thematic Maps: Unlike reference maps, thematic maps focus on specific topics, such as population density, climate patterns, economic activity, or disease spread. These maps help geographers analyze spatial distributions and trends.
The key distinction between these two types of maps lies in their focus:
Reference maps answer the question: What is where? They provide information on the locations of features without analyzing spatial patterns.
Thematic maps answer the question: How is something distributed? or How does something change across space? They use color, symbols, and other visual techniques to represent variations in data.
Reference Maps
Reference maps serve as a foundation for geographic understanding, offering a clear and accurate depiction of the Earth's physical and political landscape. They do not focus on data trends but instead provide essential spatial context.
Types of Reference Maps
Political Maps
Political maps are designed to show governmental boundaries between countries, states, provinces, and cities.
They use different colors to distinguish between political units, helping users quickly identify borders.
These maps often include capital cities, major urban areas, and key political divisions.
Common Uses:
Studying national and international boundaries.
Understanding administrative divisions within a country.
Assisting in policy-making and governance.
Example: A world political map displaying the borders of all countries and their capitals.
Physical Maps
Physical maps depict natural features such as mountains, rivers, lakes, deserts, and valleys.
They use color gradients to represent different elevations and landforms (e.g., green for lowlands, brown for mountains).
Topographic elements, such as rivers, plains, and plateaus, are clearly marked.
Common Uses:
Identifying mountain ranges, rivers, and other natural landmarks.
Studying landform patterns and geological features.
Supporting environmental and conservation research.
Example: A physical map of North America showing the Rocky Mountains, Great Lakes, and Mississippi River.
Road Maps
Road maps focus on transportation networks, detailing highways, major roads, smaller streets, and transportation hubs.
They often include symbols for gas stations, rest areas, and important landmarks.
Common Uses:
Navigation and route planning for travelers.
Urban transportation planning and infrastructure development.
Identifying the fastest or most efficient routes.
Example: A road map of California highlighting interstates, scenic routes, and toll roads.
Plat Maps
Plat maps provide detailed property boundaries and land ownership information.
They show individual plots of land, lot numbers, zoning details, and property lines.
Often used by surveyors, real estate professionals, and government agencies.
Common Uses:
Planning real estate developments and property sales.
Understanding land divisions and zoning regulations.
Resolving property disputes.
Example: A plat map of a suburban neighborhood displaying individual lot boundaries and street names.
Locator Maps
These maps emphasize a specific location or geographic feature in relation to a larger area.
Often used in news articles, travel guides, and business advertisements.
Common Uses:
Highlighting a business location on a larger city map.
Providing spatial context for news stories.
Showing event venues and points of interest.
Example: A locator map in a magazine showing the location of a new shopping mall within a city.
Thematic Maps
Thematic maps focus on data representation and help in analyzing patterns and trends across different regions. They are used extensively in geography, environmental studies, public health, and economics.
Types of Thematic Maps
Choropleth Maps
Choropleth maps use color shading to represent different values of a variable across geographic regions.
Darker shades typically indicate higher values, while lighter shades indicate lower values.
Common Uses:
Mapping population density by region.
Displaying income levels, literacy rates, or crime statistics.
Analyzing election results.
Example: A choropleth map of the U.S. showing varying levels of median household income by state.
Dot Distribution Maps
These maps use dots to represent the frequency of a phenomenon.
Each dot corresponds to a specific quantity (e.g., one dot = 1,000 people).
High concentrations of dots indicate dense clustering.
Common Uses:
Mapping population distribution.
Displaying disease outbreaks.
Showing the distribution of businesses or crops.
Example: A dot map showing COVID-19 cases across the United States.
Graduated Symbol Maps
Symbols (e.g., circles or squares) of varying sizes represent different magnitudes of a variable.
Larger symbols indicate higher values, and smaller symbols indicate lower values.
Common Uses:
Mapping GDP per country.
Displaying earthquake magnitudes.
Representing city population sizes.
Example: A graduated symbol map of global oil production, where larger oil barrels indicate higher production levels.
Isoline Maps
Isoline maps use lines to connect points of equal value.
Used in meteorology, environmental science, and topography.
Common Uses:
Weather maps showing temperature or pressure differences.
Topographic maps representing elevation changes.
Precipitation maps showing rainfall levels.
Example: A temperature map where each line connects locations with the same temperature.
Cartograms
Cartograms distort geographic shapes to represent data rather than actual land area.
The size of each region is proportional to a specific variable.
Common Uses:
Visualizing population distribution.
Displaying electoral votes.
Representing carbon emissions by country.
Example: A U.S. election cartogram where states with more electoral votes appear larger than those with fewer votes.
Key Takeaways
Reference maps provide essential geographic context and are used for navigation, land ownership, and spatial awareness.
Thematic maps highlight patterns, distributions, and trends in data, making them useful for geographic analysis and decision-making.
Different map types serve distinct purposes, helping geographers and researchers analyze the world more effectively.
